
15:55 〜 16:10
[1D4-02] LinkGlide: a Wearable Haptic Device with Multiple Parallel Inverted Five-bar Linkages for the Presentation of the Object Sliding Motion, Softness, Weight, and Vibration at the Palm.
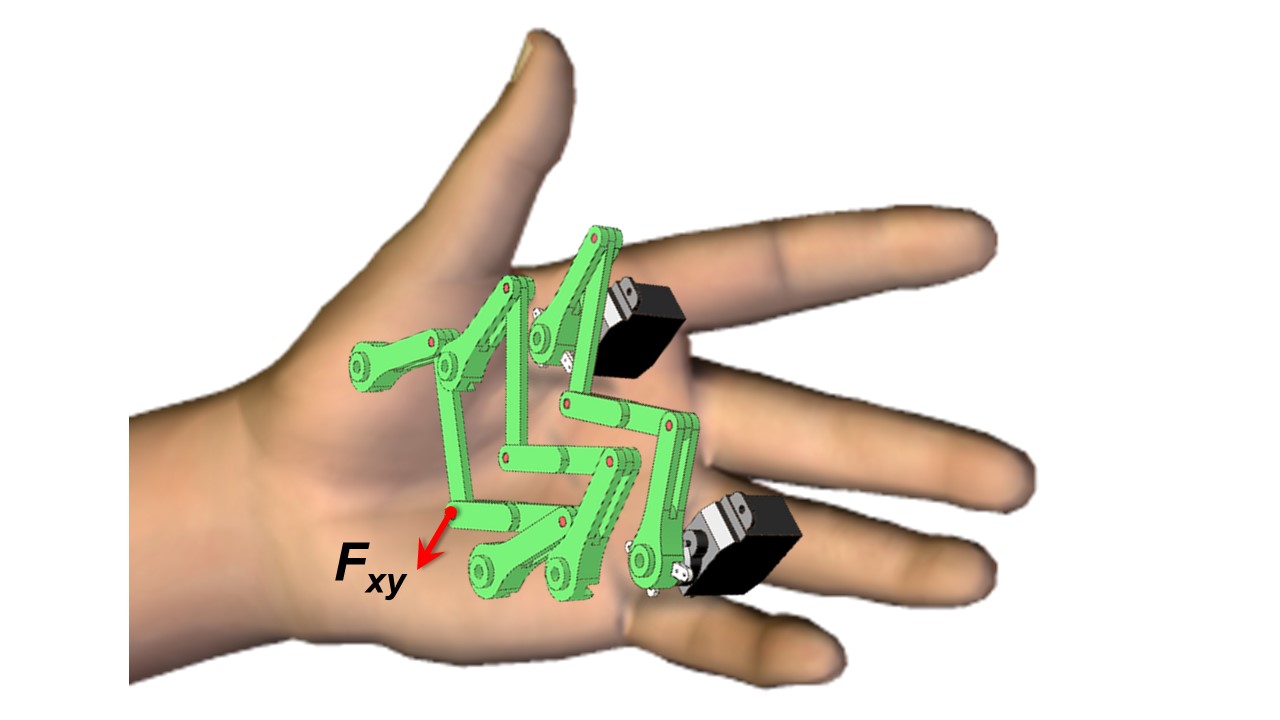
In many VR and AR applications it is required to present the sensation of the object sliding in the hand. For example, the user of NurseSim Virtual Reality simulator must understand the patient body slippage to avoid the patient body drop. LinkGlide consists of three 2-DoF LinkTouch devices distributed in parallel planes to produce the sliding force on the skin and the contact state at the palm. Two servo motors of each LinkTouch device control the planar position of the single contact point between palm and linkage, therefore three contact points can be created. When we need to generate the sensation of object sliding downwards, all three contact points moves on the skin surface from upper side of the palm in the same direction. The force of at contact point is controlled using the pressure sensor and impedance control, therefore the desired force of sliding motion can be generated to represent heavy, average, lightweight object, and to simulate the object softness. The frequency at the end-effector is generated by the high-frequency oscillations of two motors, so the sensation of friction against the textured clothes is simulated.
抄録パスワード認証
抄録の閲覧にはパスワードが必要です。パスワードを入力して認証してください。
パスワードは9/12のメールをご参照ください。