
デモンストレーションセッション
SSII2016 デモンストレーションセッションハイライト
DS1-01 単板撮像素子を用いたリアルタイムRGB-NIRイメージングシステム
~手軽にリアルタイムでカラー画像と近赤外線画像を取得!~
吉崎和徳(オリンパス 技術開発部門)、福西宗憲(オリンパス 技術開発部門)、小宮康宏(オリンパス 技術開発部門)、紋野雄介(東工大)、寺中駿人(東工大)、田中正行(東工大)、奥富正敏(東工大)
人の目では可視域を見ることができますが、もし近赤外域を見ることができたら、どんな世界が広がっているでしょうか? 我々はRGBに加えてNIR(近赤外線)の画素を備えたRGB-NIR単板撮像素子および可視画像と近赤外線画像をリアルタイムに表示可能なカメラシステムを開発しました。本展示では、開発したカメラシステムを用いて、様々な応用可能性の一端をご紹介します。可視画像と近赤外線画像を同時に取得することで拓かれる新しい世界を体験してみませんか?
DS1-02 擬似ピクセルコーディング露光CMOSイメージセンサによるハイスピード撮像
〜x16倍の高速撮像を実現するCMOSイメージセンサ〜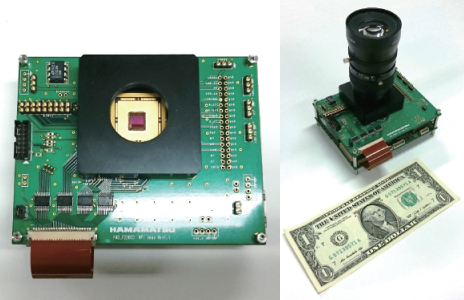
園田 聡葵(九州大学),長原 一(九州大学),遠藤 健太(浜松ホトニク
ス),杉山 行信(浜松ホトニクス),谷口 倫一郎(九州大学)
近接ピクセルの露光タイミングをランダムにずらすことでフレーム
レートのx16倍の高速撮像を実現しました
DS1-03 誰でも使えるオンライン3次元計測システム
〜誰でも簡単 その場で3次元計測〜
伊藤 秀哉(東北大学),平舘 睦基(東北大学),伊藤 康一(東北大学),青木 孝文(東北大学)
デジタルカメラを用いて物体を撮影するだけで,物体の3次元形状を高精度かつ密に計測します.3次元計測は,広い分野で注目されている技術ですが,計測には高価な装置(レーザスキャナ)や専門的な知識(カメラのキャリブレーション)が必要です.提案システムでは,専門的知識を必要とせず,自由な視点から撮影したカメラ画像からその場で3次元計測を行うことができます.
DS1-04 人間の視覚特性を考慮した通常ディスプレイによる仮想視力矯正
〜メガネなしでも鮮明な画像を視聴できるテレビ〜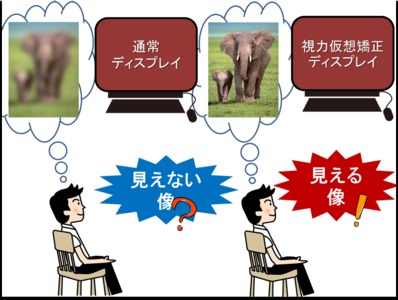
青木翠梨,堀恵実,坂上文彦,佐藤淳(名古屋工業大学)
我々は,低視力者でもメガネをかけることなく鮮明なビデオを視聴可能な新しい映像提示技術を提案します.この技術では,提示画像に特殊な画像処理を施すことで,視力の低下による画像の乱れを打ち消し,低視力者にも鮮明な画像を観測させることを実現します.展示では,視力を低下させるメガネを用いてビデオを観測することで,実際の効果を体験できるデモを行います.
DS1-05 1ピッチ位相解析法(OPPA法)による三次元形状・振動変位分布計測
~1枚の格子画像で位相解析、広範囲を一度に計測~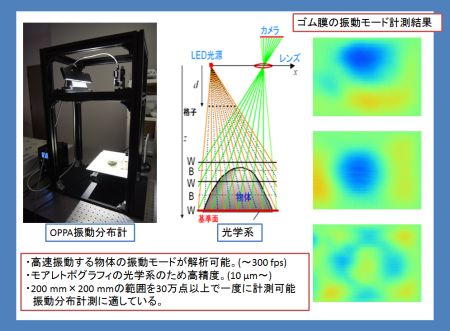
植木 将貴(4Dセンサー)、森本 吉春(4Dセンサー)、楠 芳之(4Dセンサー)、柾谷 明大(4Dセンサー)、高木 哲史(4Dセンサー)
自動車や建物など振動や音を出す構造物、水面の波の伝播など、振動する物体全面の動きの時間変化を計測できれば、振動、騒音、破損の防止に役立ちます。
今回開発したOPPA振動分布計は1枚の格子投影画像(200 mm×200 mmの範囲)から画素ごと(30万点以上)に格子の位相を解析し、高速 (~300 fps)・高精度(10 µm~)に高さ計測ができ、振動分布(振動モード)計測に適しています。高速度カメラと組み合わせ、より高速な解析も可能です。
DS1-06 オンボードカメラを用いたLEDパネルの検出と識別による UAV の飛行制御
〜安心・安全な UAV の自動飛行を目指して〜
浮田浩行(徳島大学),三輪昌史(徳島大学)
電波状況が悪く,無線操縦が困難な環境でのUAV(無人航空機)の自動飛行制御方法について検討しています.ここでは,地上に設置したLEDパネルの表示内容を,UAVに搭載したカメラで読み取り,位置情報や飛行経路の指示をUAVに与えるようにしています.LEDパネルでは,パネル検出用の点滅パターンと指示用の特定パターンを同時に表示し,点滅周期や色情報を用いてそれぞれの情報を得るようにしています.
DS2-01 80msで認識可能な深層学習による2000種類物体認識iOSアプリ
高速!高精度!省メモリ!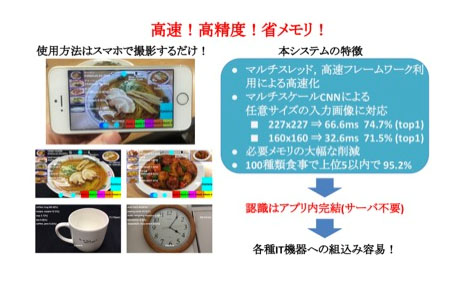
丹野良介(電気通信大学),柳井啓司(電気通信大学)
本システムでは,認識手法に深層学習を利用し,高速化の工夫により高精度かつ高速な物体認識をすることができるiOSアプリを提案します.特徴としては,1. 認識はアプリ内完結. 2. マルチスレッド,高速フレームワーク利用による高速化.3. マルチスケールによる任意画像サイズへの対応(画像サイズ調整による,認識精度と実行速度のバランス調整).4. 必要メモリの大幅な削減.などが挙げられます.サーバ不要であるので,各種IT機器への組込みは容易です.
DS2-03 Point-Plane SLAMを搭載した3次元計測システム
〜RGB-DセンサとタブレットPCの組み合わせで空間3Dモデルを構築〜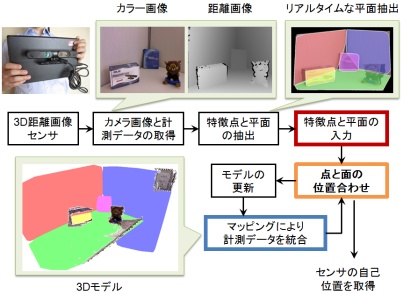
渡邊清高(三菱電機), 川西亮輔(三菱電機), 関真規人(三菱電機),
田口裕一(Mitsubishi Electric Research Laboratories)
カラー画像と距離画像を取得するRGB-DセンサとタブレットPCを用いて、比較的広い空間の3次元モデルを構築するシステムを紹介いたします。
本システムでは、センサデータから抽出される特徴点と平面を利用したPoint-Plane SLAM (Simultaneous Localization and Mapping)アルゴリズムを採用しています。これにより、タブレットPC上でリアルタイムかつ高精度に3次元モデルを構築できるようになっています。
DS2-04 ステレオカメラを利用した高速3次元線分抽出によるリアルタイム空間認識
3次元の線情報を利用したリアルタイム空間認識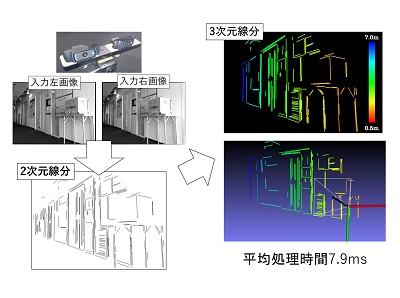
臼田稔宏、堀俊彦、安部拓也、渡邉孝信(早稲田大学)、高森哲也、苅部樹彦(富士フイルム)
近年、自動車やロボットの自動制御に向けてステレオビジョンを用いた空間認識技術が注目されています。 特に屋内や橋梁などの人工の建造物環境に多く存在する線分の3 次元情報を取得することは空間認識において重要な役割を果たします。本発表ではステレオビジョンと線分情報を組み合わせたリアルタイム空間認識技術を提案します。
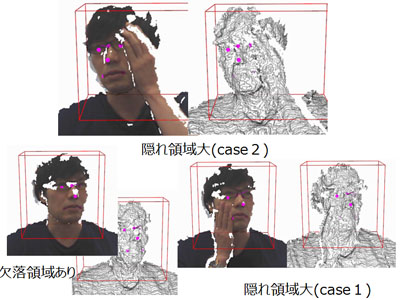
DS2-05 三角面パッチ特徴を用いた頭部姿勢と顔特徴点位置のリアルタイム推定
〜安価な距離センサを用いて、顔向きと顔特徴点位置を高速かつ安定して検出〜
三輪 祥太郎(三菱電機)、関 真規人(三菱電機)、Tim K.
Marks(MERL)、Michael Jones(MERL)
局所的な凹凸を表す多数のTSP(Triangular Surface Patch)の組み合わせで頭部全体を表現することで、ノイズや部分的な欠落もあるようなポイントクラウドからも、高速かつロバストな顔向き推定および顔特徴点の位置推定を実現します。
DS2-06 二値特徴量を用いた高速・省メモリなランドマーク推定ソフトウェア trACE
Low-power CPU向けのソフトウェア.特別なハードウェアが不要.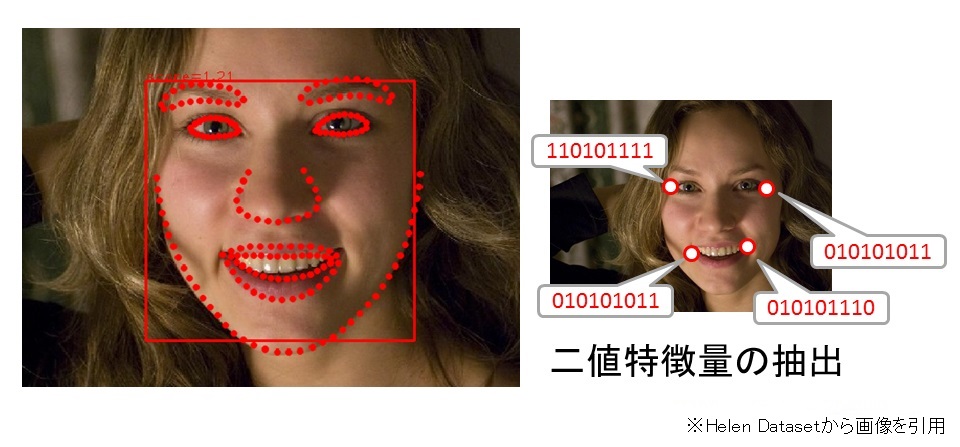
安倍 満, 株式会社デンソーアイティーラボラトリ
松本 拓也, 株式会社デンソーアイティーラボラトリ
本デモンストレーション発表では,検出対象を包含する矩形だけでなく,あらかじめ規定した特徴点(以下、ランドマーク)を同時に推定するソフトウェアtrACEを紹介します.本ソフトウェアは,二値特徴量を用いることで高速かつ省メモリに動作するように設計されており,低スペックなマイコン環境での動作が期待できます.
DS2-07 髪型合成及び痩せ太りを含む顔の個人性を保持したパーツベース経年変化シミュレータ
〜貴方の過去・未来の顔を予測します〜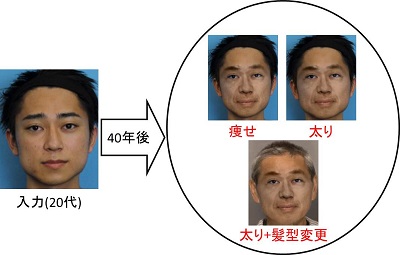
サフキン パーベル(早稲田大学) 藤崎 匡裕(早稲田大学) 森島 繁生(早稲田大学理工学術院総合研究所)
本展示では,犯罪捜査支援を目的とした人物の現在の顔から過去・未来の顔を推定する経年変化シミュレータを提案します.このシステムでは,経年変化後の顔における髪型の入れ替えや,痩せ太り状態の変更を可能としており,様々なバリエーションの結果が生成可能となっております.また,この際入力人物の顔特徴を保持するため,得られる結果は人物の個人性を考慮に入れたものになります.
DS2-08 テレビ電話と連携した人形型デバイスを用いた高齢者の遠隔見守りシステム
ボタン1つで家族とつながる人形付きテレビ電話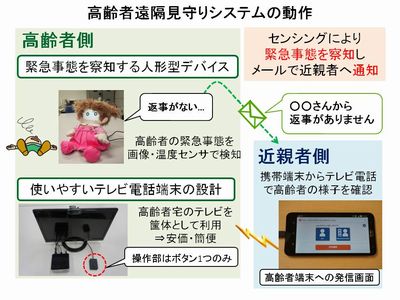
大津耕陽,松田 成,福田悠人,小林貴訓,久野義徳 (埼玉大学)
近年増加している独居高齢者の認知症進行予防を目的として,近親者との遠隔テレビ電話と見守りを両立したシステムを開発しました.高齢者宅のテレビに小型PCを付加するだけ,操作は1ボタンのみという簡便な設計で認知症高齢者にも受け入れられやすく,人形型ロボットが近親者に代わって高齢者を見守り,近親者は携帯端末を通じて緊急事態を早期に察知できます.
DS2-09 時系列Deep Learningを用いた多種多様なドライバー状態の一括センシング
〜自動運転時代を見据えた交通事故削減を目指して〜
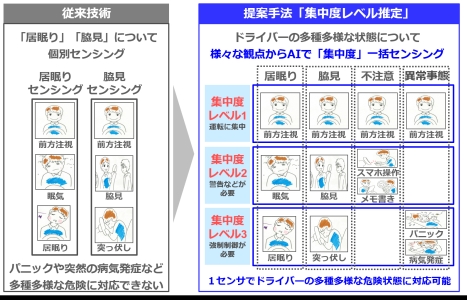
日向 匡史(オムロン), 木下 航一(オムロン), 青位 初美(オムロン), 濱走 秀人(オムロン), 山下 隆義(中部大学), 藤吉 弘亘(中部大学), 諏訪 正樹(オムロン), 川出 雅人(オムロン)
昨今、てんかんや薬物・病気などを原因とした重大交通事故が相次いています。交通事故削減のためには、居眠りや脇見だけでなく、多種多様なドライバーの状態をセンシングすることが求められています。我々は近赤外カメラ+時系列Deep Learningにより、多種多様なドライバーの状態を一括で高精度にセンシングする技術を開発しました。本展示ではドライバーの「集中度レベル推定」、自動運転時にドライバーが手動運転への復帰可能か判断する「運転復帰可否レベル推定」のデモをそれぞれ展示します。