[O-2-263] 高磁場環境で動作するMR画像と超音波画像を用いた穿刺支援ロボットシステムの開発
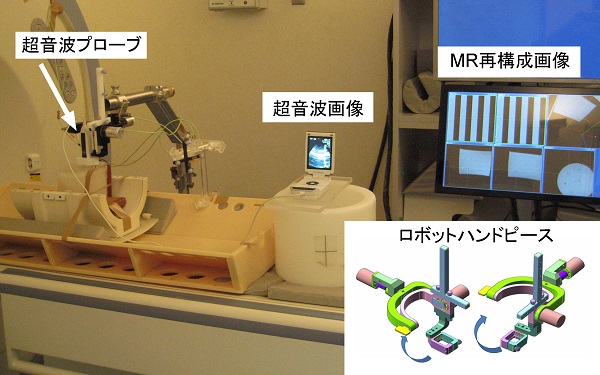
昨年の本大会において、通常MR装置の開口部近傍で標的を追尾する穿刺支援ロボットを用いて、磁石内外でシームレスな画像ナビゲーションを実現するシステムについて報告した。このシステムは、MR撮像を行って標的の位置座標を求め、対象を磁石外に引出して、レジストレーションの操作なしに、標的への最適な穿刺ルートの選択を可能とするものである。また、穿刺後には針の位置と方向を記録してMRシステムにその情報を伝え、位置決め画像なしに穿刺針の走行に一致した断面での確認画像を撮影することができる。しかし、このシステムの最大の欠点は、穿刺操作は、一定の深さまで針を進めることをブラインドで行わねばならず、穿刺結果をMR画像で確認する必要があることである。この点を解決するため、超音波画像を併用することを試みた。先ずタブレット型の簡易超音波診断装置を磁場近傍に持ち込み、正常に動作することを確認した後、ロボットハンドピースに超音波プローブを把持させる機構を追加した。超音波プローブはニードルガイドを中心として180度回転できるようにし、いかなる穿刺方向であっても対象の表面にプローブが密着できるようにした。現在の超音波装置では画像の取出しができず、MR画像と超音波画像を個別の画面で観察する必要があるが、これらの画像を統合して表示することのできるナビゲーションシステムの開発を目指している。